Presentations
Selection of presentations and talks.
-

Petras, V., 2018, Jupyter: Jupyter Notebooks for research and education in the computational sciences, #FuturePub – New Developments in Scientific Collaboration Tech, Raleigh, NC, USA, April 5, 2018.
Jupyter is an open source tool for data analysis, visualization, computations, and programming. With Jupyter Notebooks, code can be combined with equations, narrative, and visualizations into shareable documents. Together with other tools such as Docker, Jupyter can serve as a tool for sharing fully reproducible research or as a unified environment for education in the computational sciences.
-

Petras, V., Mitasova, M., Petrasova, A., Tabrizian, P. Open source at NCSU Center for Geospatial Analytics . North Carolina State University, first presented in November 2017.
-

Petras V., Neteler M., Petrasova A., Mitasova H. Advanced geospatial technologies: The new powerful GRASS GIS 7.2 release. FOSS4G 2017 - Boston, August 2017.
-

Petras V. How to make your research reproducible. US-IALE, Baltimore, April 9-13, 2017.
-
Petras V., Petrasova A., Mitasova H. 3D rasters are powerful and you already know how to use them. US-IALE, Baltimore, April 9-13, 2017.
-

Petras, V., 2017, 33 years of GRASS GIS as an innovation platform, NCGIS2017, Raleigh, NC, USA, February 22-24, 2017.
US Army CERL started GRASS GIS development in early 80s. Since then, researches around the world have been selecting GRASS GIS as a platform for their new tools. Early on GRASS GIS got 3D view, advanced interpolation methods, hydrology and image processing tools. 3D rasters and time series are now standard data types at the same level as vectors or rasters. Recent developments include novel landform detection, tangible user interface and spatio-temporal algebra. This talk will cover all of this and will show why you should start using GRASS GIS today.
-
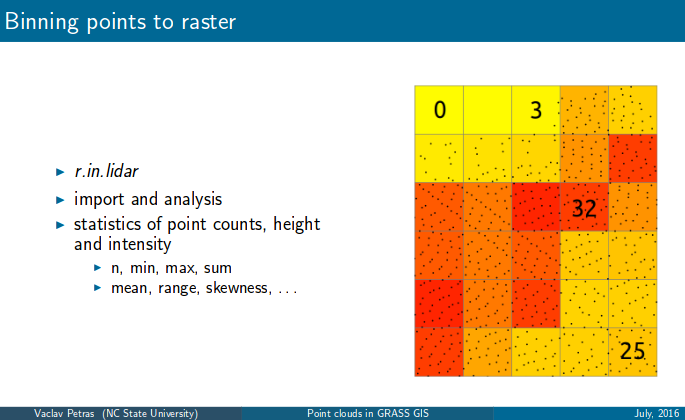
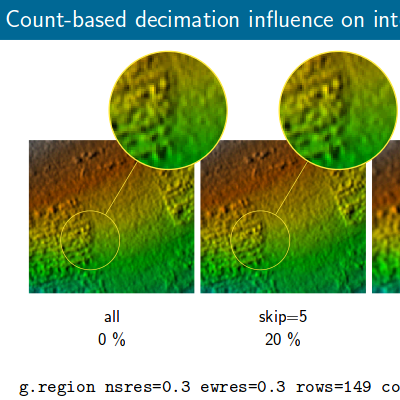
Petras, V.; Petrasova, A.; Jeziorska, J.; Mitasova, H., 2016, Processing UAV and lidar point clouds in GRASS GIS, XXIII ISPRS Congress in Prague, Czech Republic, July 12-19, 2016. [Associated paper in ISPRS Archives, other versions of slides]
Today's methods of acquiring Earth surface data, namely lidar and unmanned aerial vehicle (UAV) imagery, non-selectively collect or generate large amounts of points. Point clouds from different sources vary in their properties such as number of returns, density, or quality. We present a set of tools with applications for different types of points clouds obtained by a lidar scanner, structure from motion technique (SfM), and a low-cost 3D scanner. To take advantage of the vertical structure of multiple return lidar point clouds, we demonstrate tools to process them using 3D raster techniques which allow, for example, the development of custom vegetation classification methods. Dense point clouds obtained from UAV imagery, often containing redundant points, can be decimated using various techniques before further processing. We implemented and compared several decimation techniques in regard to their performance and the final digital surface model (DSM). Finally, we will describe the processing of a point cloud from a low-cost 3D scanner, namely Microsoft Kinect, and its application for interaction with physical models. All the presented tools are open source and integrated in GRASS GIS, a multi-purpose open source GIS with remote sensing capabilities. The tools integrate with other open source projects, specifically Point Data Abstraction Library (PDAL), Point Cloud Library (PCL), and OpenKinect libfreenect2 library to benefit from the open source point cloud ecosystem. The implementation in GRASS GIS ensures long term maintenance and reproducibility by the scientific community but also by the original authors themselves.
-

Petras, V., Petrasova, A., Mitasova, H. GRASS GIS loves lidar . May 2-5, 2016, FOSS4G North America 2016, Raleigh, USA. [other versions]
Lidar and UAV measurements produce huge point clouds which cannot be handled by classic GIS tools. Not true! New GRASS GIS version offers several tools which are specifically designed for processing of lidar data and point clouds in general. Lidar devices and structure from motion (SfM) processing of UAV imagery are generating large and dense points clouds which are hard to handle as classic GIS vectors. Fortunately, GRASS GIS, a powerful desktop and backend GIS, has a selection of tools which can handle this kind of data. For example, various point cloud decimations are useful as a pre-processing step before interpolation. However, the most significant group of provided analyses uses 2D and 3D binning for highly efficient digital terrain model creation and also for various vegetation and surface analyses. Additionally, we will explore old and new ground classification techniques in GRASS GIS and which analyses PDAL has to offer in connection with GRASS GIS. In this talk we will also look at point clouds from small scanners, namely Kinect, and how these can be processed in GRASS GIS in combination with PCL to couple digital elevation models with scaled physical models. The tools available in GRASS GIS can be used through a graphical user interface or in Bash and Python scripts which can accommodate individual user workflows as well as specific developer needs. We will see how these relate and how to take advantage of all of them.
-

Petras, V., Newcomb, D., Mitasova, H. Efficient processing of dense point clouds in GRASS GIS . April 3-7, 2016, US-IALE Annual Meeting, Asheville, NC, USA. [other versions]
GRASS GIS offers a plethora of analysis for terrain and remote sensing processing. In this talk we will present new tools in GRASS GIS for processing dense point clouds obtained by LiDAR surveys or through structure from motion (SfM) processing of UAV imagery. With quality and efficiency in mind, we will look in detail at techniques for deriving raster topographic products ranging from micro-topography to the regional scale. We will apply GRASS GIS 2D and 3D raster capabilities to multiple return LiDAR data to derive vegetation height and density maps. We will also explore tools in GRASS GIS for terrain visualization and analysis such as sky-view factor and local relief model, which can help us to detect subtle terrain features and evaluate the quality of generated surfaces. Finally, we will see how GRASS GIS can work together with PDAL, a new and powerful point cloud processing package.
-
Petras, V. New lidar processing functionality in GRASS GIS 7.1 . Presentation for U.S. Fish and Wildlife Service Remote Sensing Technical Group meeting. February 22, 2016.
-
Petras, V. Efficient processing of dense UAV point clouds. . Class project presentation in GIS595/MEA792: UAV/lidar Data Analytics. December 1, 2015.
-

Petras V., Petrasova, A., Cepero-Perez, K., Neteler, M., Delucchi, L., Landa, M., Mitasova, H. Using Free and Open Source Solutions in Geospatial Science Education. FOSS4G Europe 2015. July 16, 2015, Como, Italy.
Free and open source software (FOSS) is a crucial part of open and reproducible science and is becoming increasingly important for the geospatial industry. We address these needs in our geospatial education program by integrating FOSS into our courses. In our talk, we share our experience with teaching geospatial modeling courses at North Carolina State University (NCSU), focusing on the recent improvements, usage of new GRASS GIS 7 and incorporations of innovative technologies in the course materials. Moreover, we will show how the course material can be used in different countries with location specific data. Since 2008 our graduate students have the opportunity to take a course on geospatial modeling and analysis taught with both open source and proprietary software. In the hands-on assignments students use the free and open source package GRASS GIS and the proprietary package ArcGIS to perform similar geospatial tasks. Each assignment is accompanied by a software-independent lecture on the theory behind the particular geospatial concepts. By using two software packages, our goal is to ensure that students can distinguish more easily between GIS concepts and specifics of GIS software, become true experts in GIS and gain flexibility to choose optimal solutions for their future work. Recently we have redesigned our course materials to be easier to follow and navigate for our on-campus and distance education students, but also to make them easier to share and modify for the FOSS community of educators. Our materials are static HTML websites which are highly portable and simple to edit. We use the Git revision control system in combination with GitHub to manage and share the source files. We developed Python scripts to build the website and to extract all GRASS GIS assignment instructions into a script which can be executed in GRASS GIS in order to test and ensure all instructions are correct and give expected results. Our teaching material is available online, being shared under Creative Commons Attribution-ShareAlike (CC BY-SA) license. The assignments in our courses are based on the “North Carolina sample dataset”, which is also used in GRASS GIS manual pages and tutorials. However, instructors in other regions often prefer to teach with local datasets which makes sharing of hands-on teaching material challenging. Therefore, we are currently transitioning to an updated version of the North Carolina sample dataset which includes frequently used and commonly available data with standardized names such as elevation, streets, or lakes. This will allow any instructor to create new datasets in different parts of the world with names compatible with our teaching materials, and thus helping the students to learn geospatial concepts in the local context. We will present sample results from these shared assignments for North Carolina, Puerto Rico, Italy and the Czech Republic.
-
Petras, V., Mitasova, H., Petrasova, A. (Presented by H. Mitasova.) Mapping gradient fields of landform migration. Geomorphometry 2015. June 24, 2015, Poznan, Poland. (Associated publication in Geomorphometry for Geosciences)
-
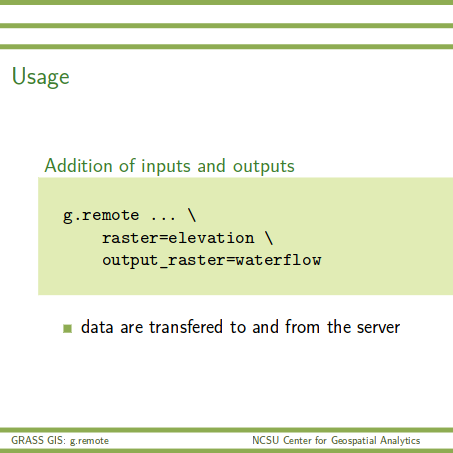
Petras, V., NCSU Center for Geospatial Analytics, Landscape Dynamics Lab, May 2015. g.remote: Remotely execute GRASS GIS scripts on your server.
Access to a powerful Linux machine can be easier with GRASS GIS module specialized on communication with a remote server, cluster or part of a cloud.
-

Petras, V., NCSU Geospatial Analytics Forum, October 2014. How Open Source Geospatial Development Works.
Easy reproducibility, fearless open sharing, broad collaboration, long-term preservation of outcomes and much more are common things in free, libre and open source software, academia can do the same using open source software and open source approach.
-

Petras, V., Petrasova, A., Mitasova, H., FOSS4G 2014. Spatio-temporal data visualization in GRASS GIS: desktop and web solutions. Web page with selected animations and applications links, Video of the talk on Vimeo.
-

Petras, V., NC State University FOSS Fair 2014. Open source at OSGeoREL.
GRASS GIS and NCSU OSGeoREL (now GeoForAll Lab) experience with open source development in academia.